辽宁石油化工大学学报 ›› 2023, Vol. 43 ›› Issue (6): 89-96.DOI: 10.12422/j.issn.1672-6952.2023.06.014
• 信息与控制工程 • 上一篇
Jian HOU1( ), Heng LIU1, Linke LIU1, Bin PAN2(), Yuping ZHANG2
), Heng LIU1, Linke LIU1, Bin PAN2(), Yuping ZHANG2
摘要:
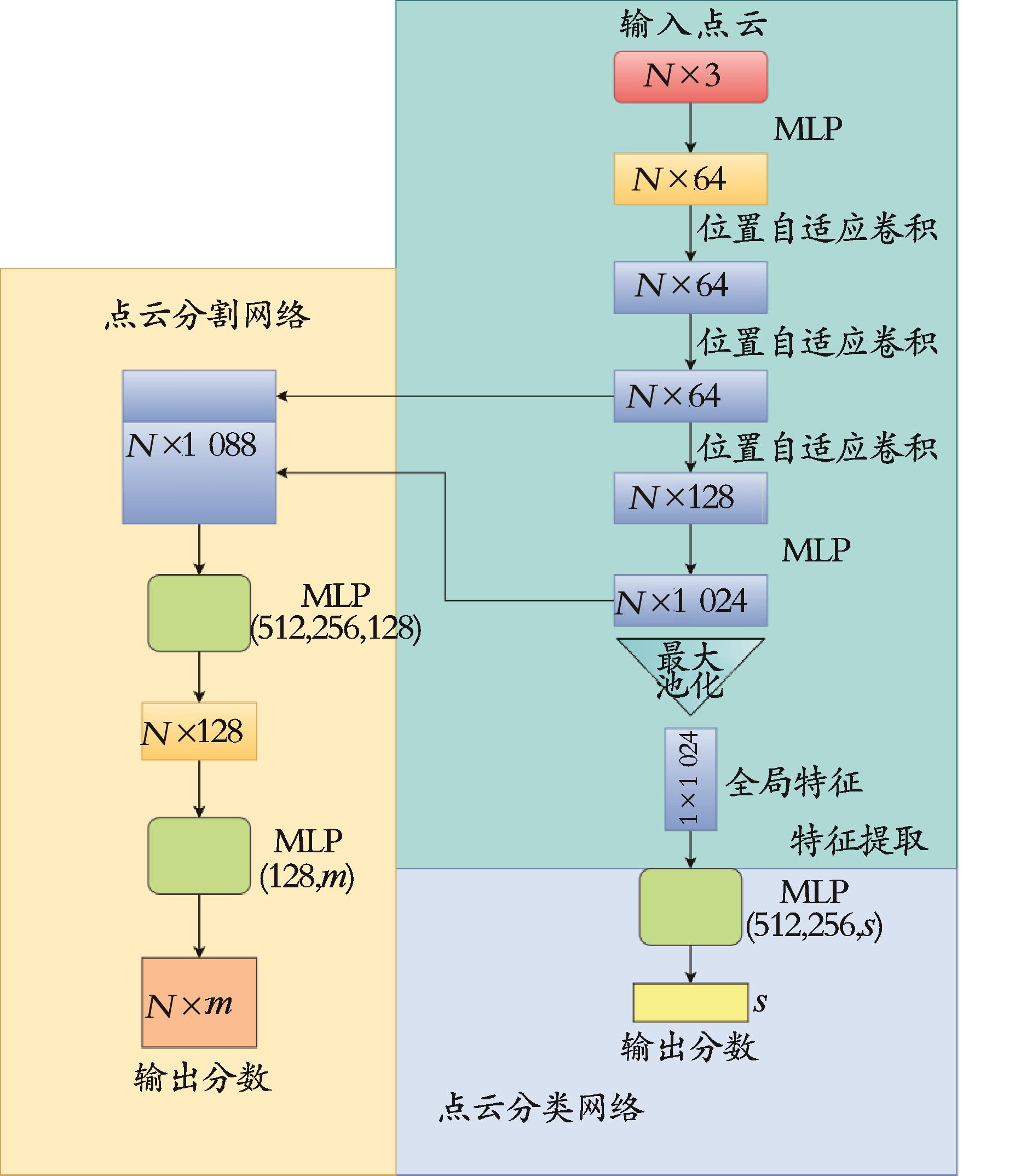
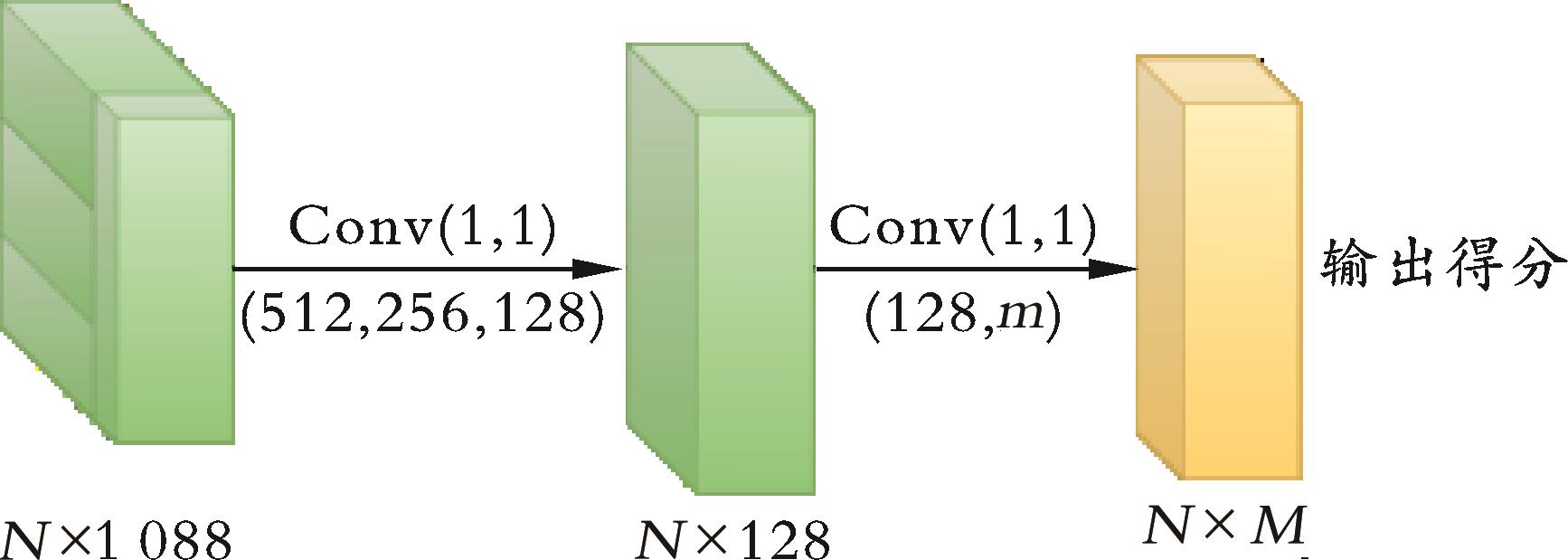
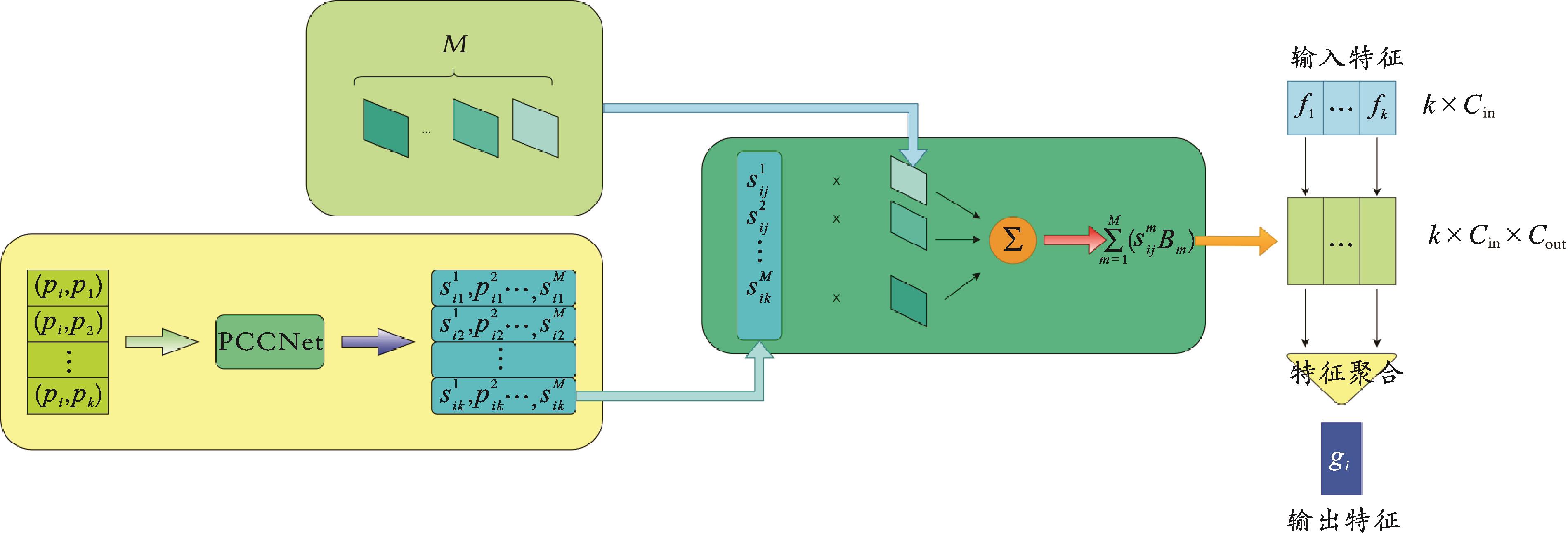
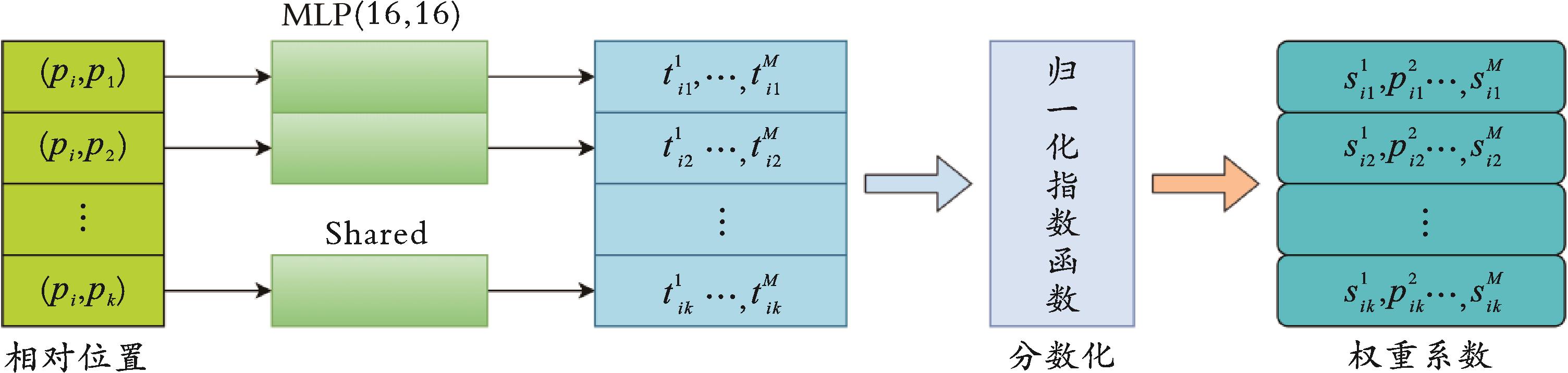
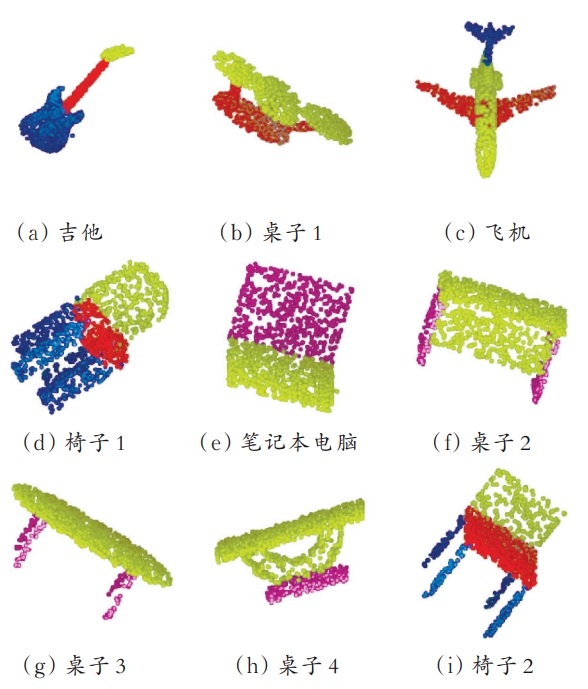
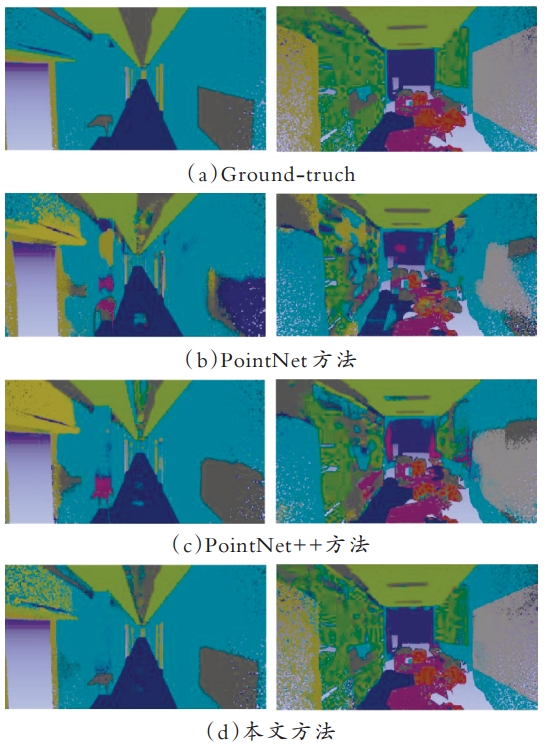
在点云处理领域中深度学习是一种主流的方法,但是现有方法对三维点云的局部结构信息利用不够充分,对局部形状感知较差。为此,提出了一种基于改进PoinetNet的三维点云处理模型,本模型将位置自适应卷积引入到PointNet中。位置自适应卷积采用动态的方式组合权重库中的权重矩阵来构造核函数,其中权重矩阵的系数是通过位置相对系数网络从点与点相对位置自适应学习得到的。通过此方式构建的核函数,可以更好地解决点云数据的不规则性和无序性问题。位置自适应网络在三维物体分类实验上分类准确率相较于PointNet提升3.60%,在三维物体零件分割实验上平均交并比相较于PointNet提升2.20%,在三维场景语义分割实验上平均交并比相较于PointNet提升9.14%。
中图分类号:
侯健, 刘恒, 刘琳珂, 潘斌, 张玉萍. 基于位置自适应的三维点云处理模型[J]. 辽宁石油化工大学学报, 2023, 43(6): 89-96.
Jian HOU, Heng LIU, Linke LIU, Bin PAN, Yuping ZHANG. 3D Point Cloud Processing Model Based on Local Position Adaptation[J]. Journal of Liaoning Petrochemical University, 2023, 43(6): 89-96.
网站版权 © 2024《辽宁石油化工大学学报》编辑部
地址:辽宁省抚顺市望花区丹东路西段1号 电话:024-56865105 E-mail:lnxuebao@126.com 邮编:113001
本系统由北京玛格泰克科技发展有限公司设计开发