辽宁石油化工大学学报 ›› 2022, Vol. 42 ›› Issue (1): 64-69.DOI: 10.3969/j.issn.1672-6952.2022.01.012
Daming Zhao1( ), Xingjun Gao1, Yue Wang2, Zilong Deng1()
), Xingjun Gao1, Yue Wang2, Zilong Deng1()
摘要:
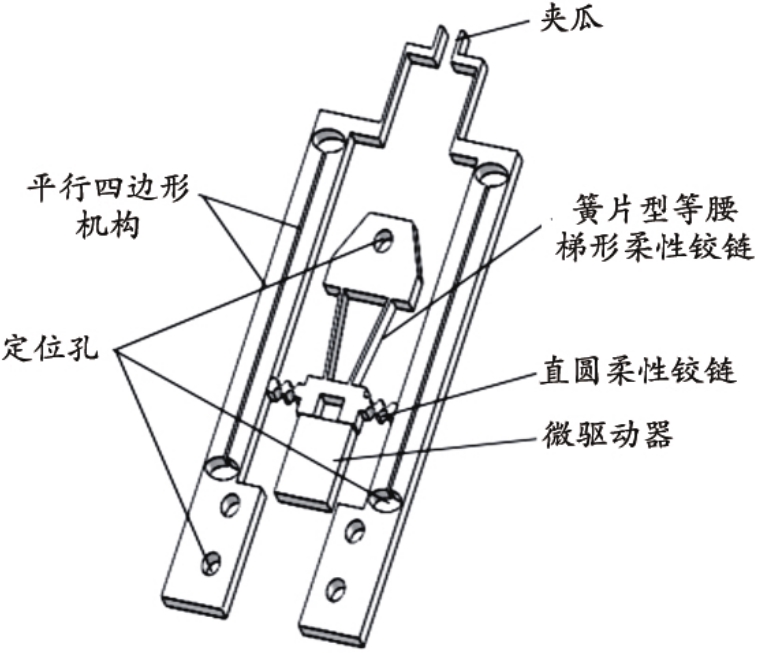
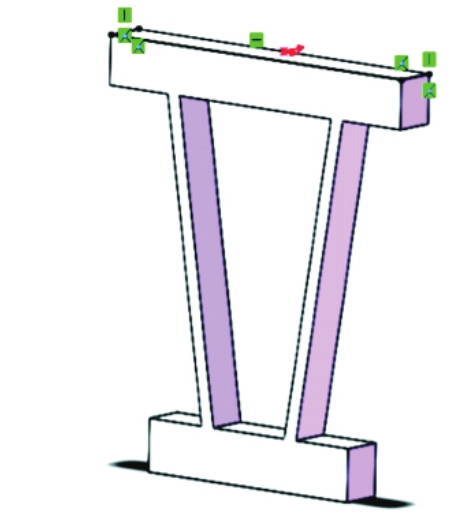
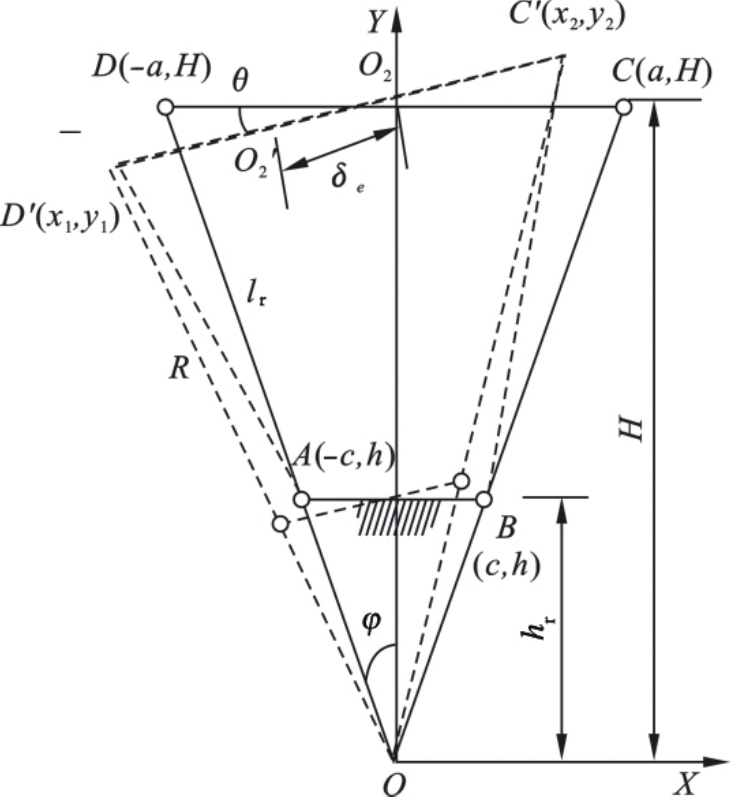
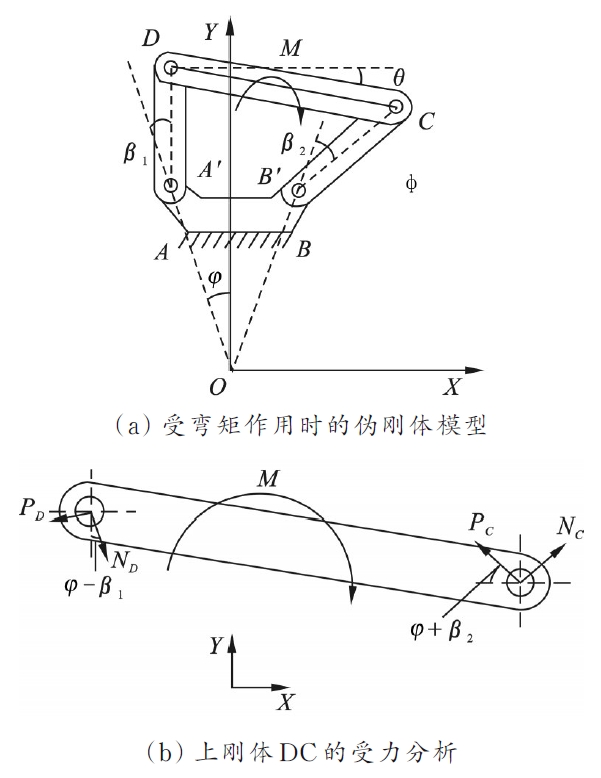
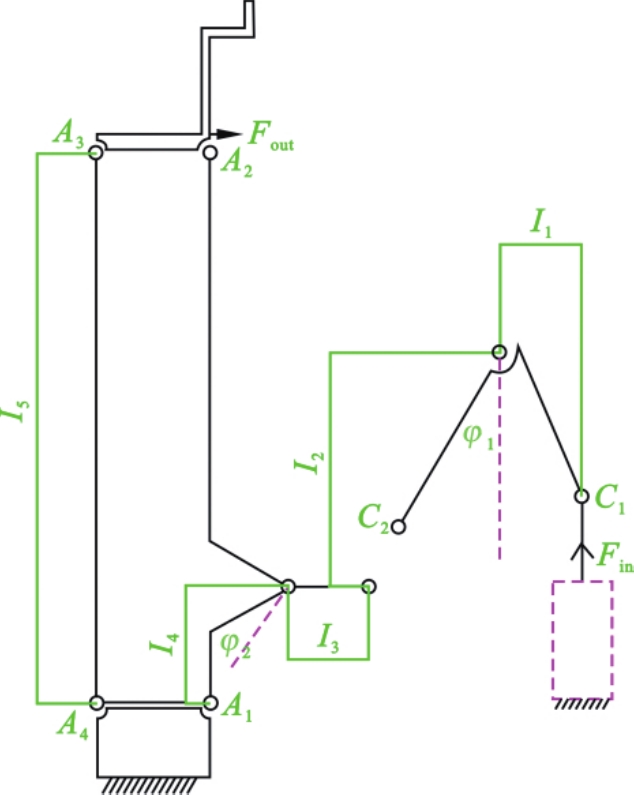
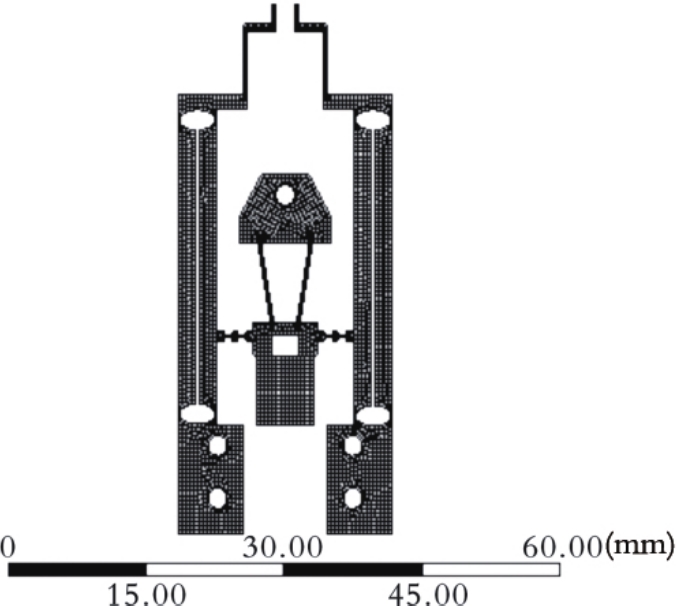
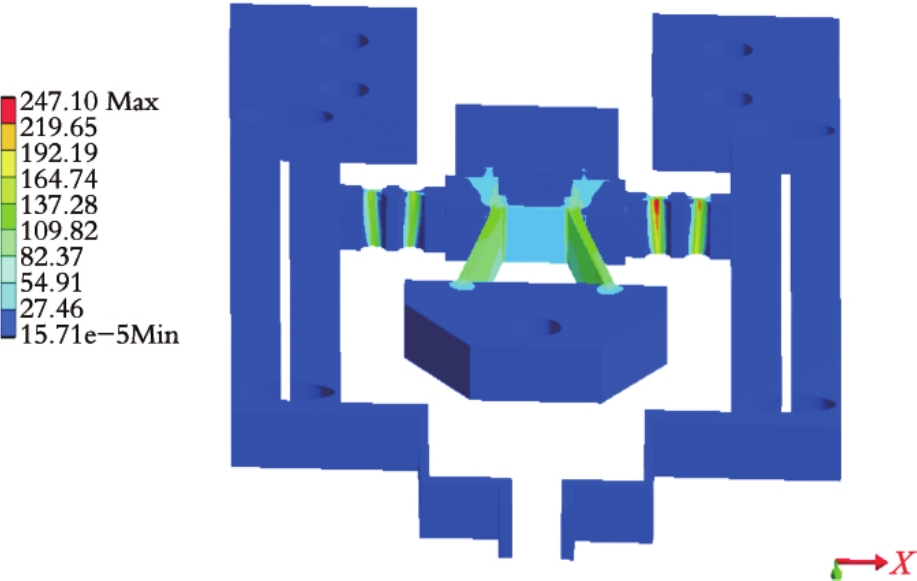
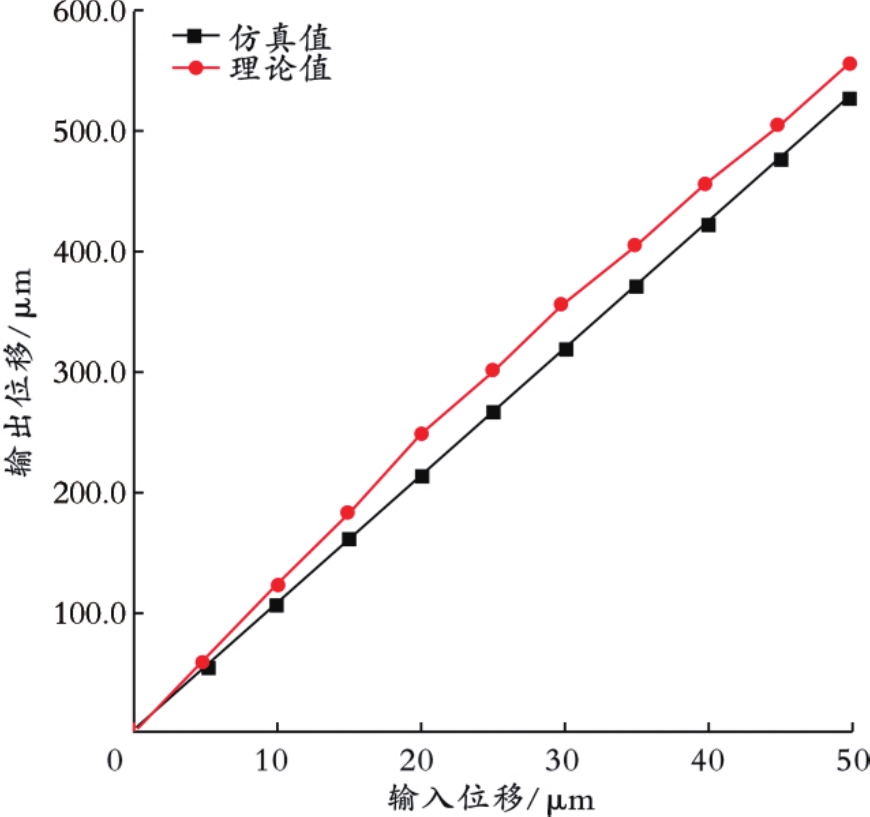
柔顺微夹钳在微操作领域和微装配过程中与被夹持物直接接触,作为微操作和微装配系统中的末端微执行器,对实现微操作和微装配任务起重要的作用。设计一种基于直圆柔性铰链和簧片型等腰梯形柔性铰链的柔顺微夹钳机构,通过理论计算推导出等腰梯形柔性铰链的转动精度和转动刚度。采用压电陶瓷驱动方式,实现了位移的放大和夹爪位移的平行移动。建立了柔顺微夹钳的机械伪刚体模型,并利用伪刚体模型法建立了运动学模型,计算出位移放大倍数,得到了输入力、输入位移与输出位移的关系。通过有限元方法对系统建立的模型进行了仿真分析验证,结果表明理论计算结果与仿真结果一致。
中图分类号:
赵大明, 高兴军, 王月, 邓子龙. 基于两种柔性铰链压电陶瓷柔顺微夹钳性能分析[J]. 辽宁石油化工大学学报, 2022, 42(1): 64-69.
Daming Zhao, Xingjun Gao, Yue Wang, Zilong Deng. Design of Piezoelectric Ceramic Pliable Microgripper Based on Two Flexible Hinges[J]. Journal of Liaoning Petrochemical University, 2022, 42(1): 64-69.
网站版权 © 2024《辽宁石油化工大学学报》编辑部
地址:辽宁省抚顺市望花区丹东路西段1号 电话:024-56865105 E-mail:lnxuebao@126.com 邮编:113001
本系统由北京玛格泰克科技发展有限公司设计开发