辽宁石油化工大学学报 ›› 2021, Vol. 41 ›› Issue (5): 79-84.DOI: 10.3969/j.issn.1672-6952.2021.05.014
Shumei Zhang1( ), Xingjun Gao1, Zilong Deng1(), Yue Wang2
), Xingjun Gao1, Zilong Deng1(), Yue Wang2
摘要:
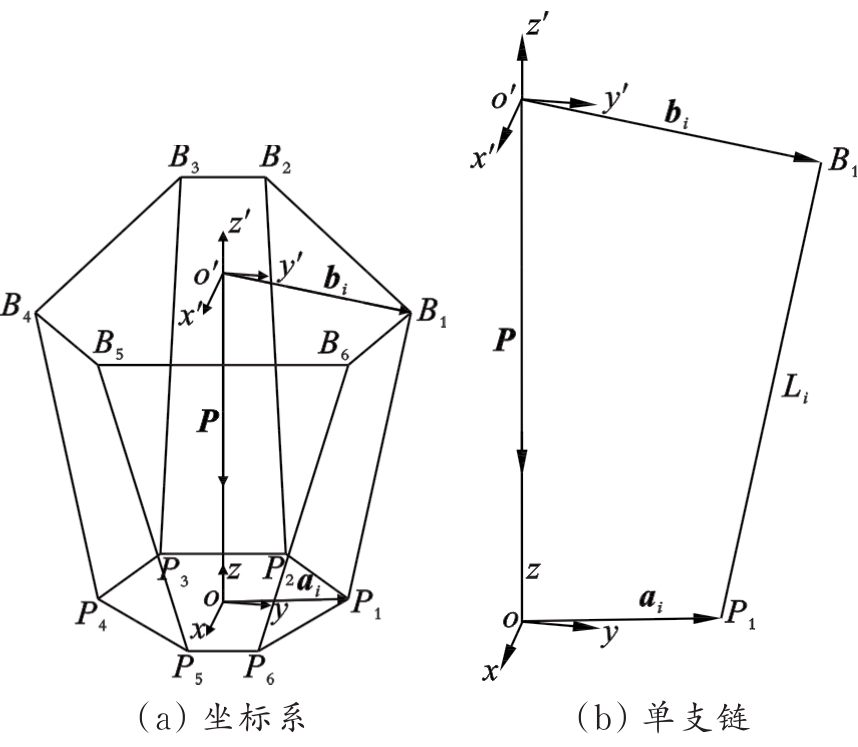
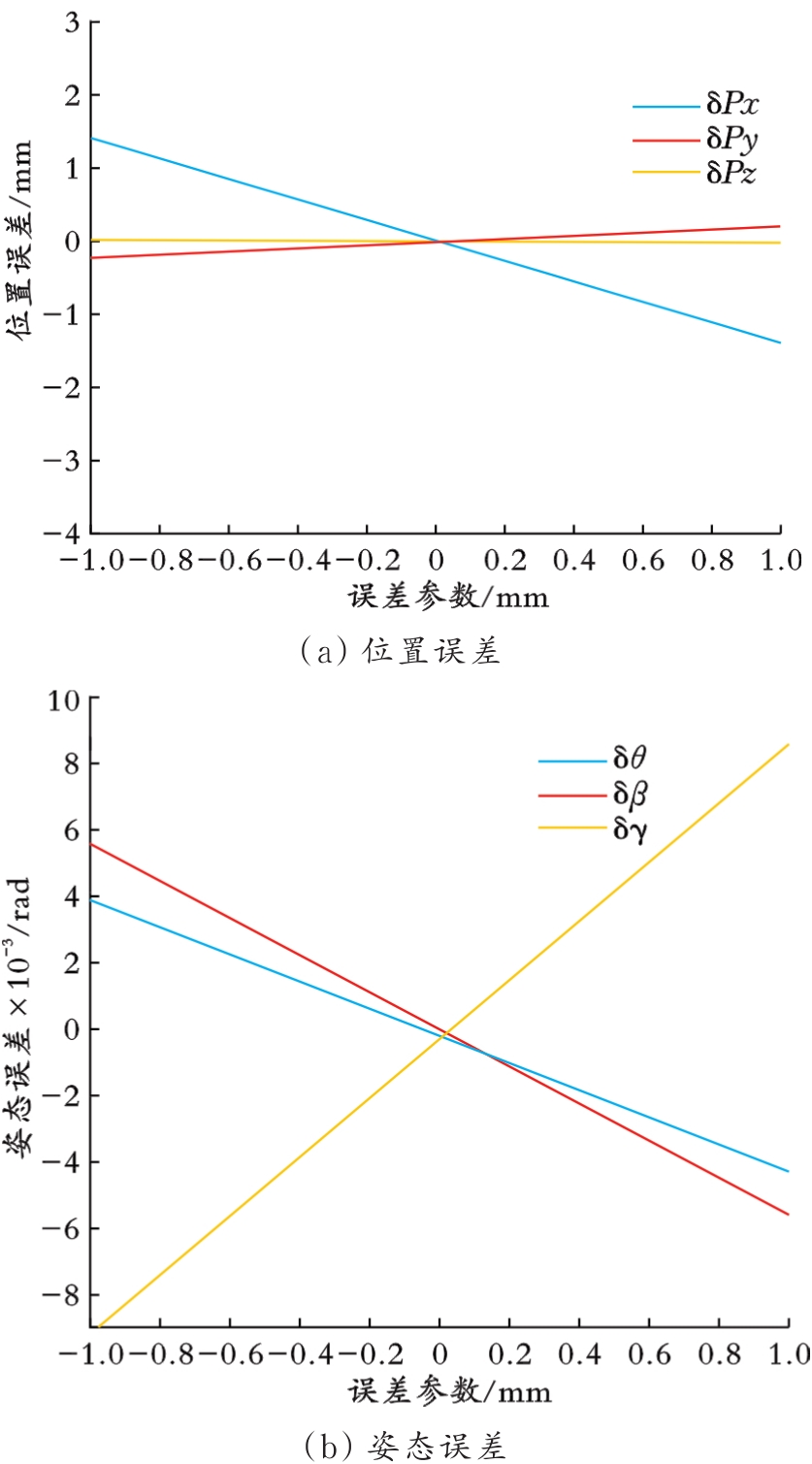
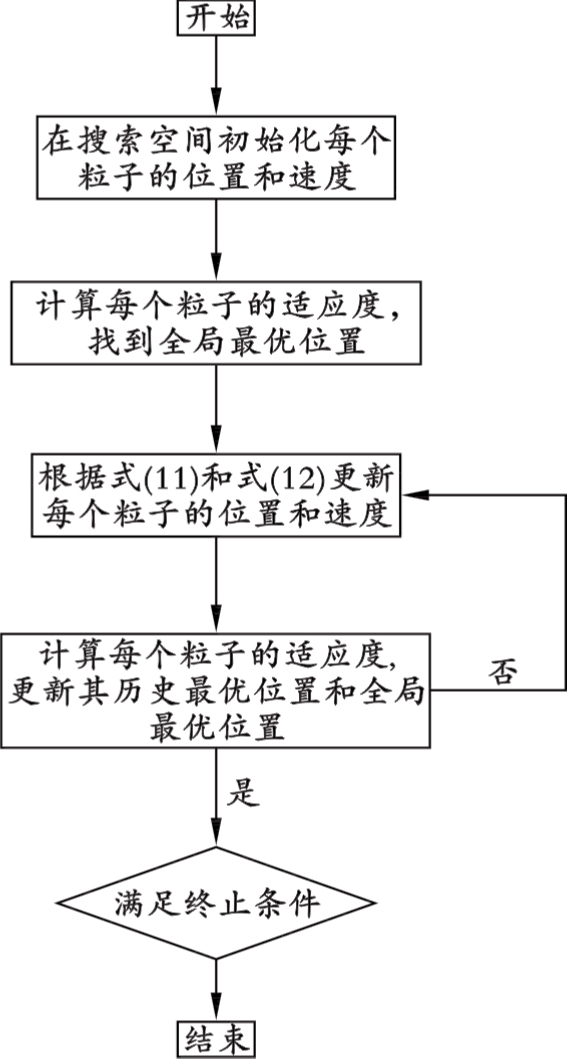
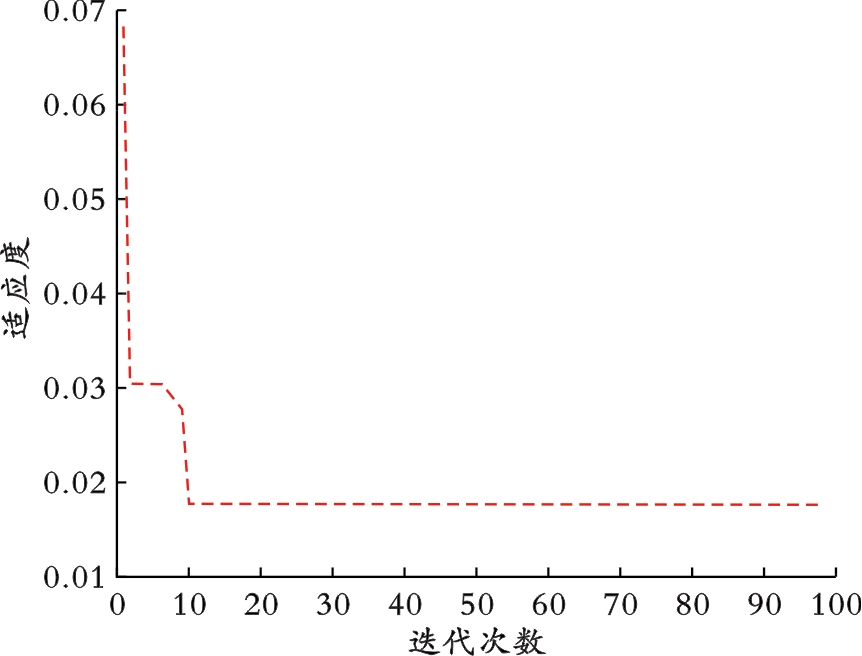
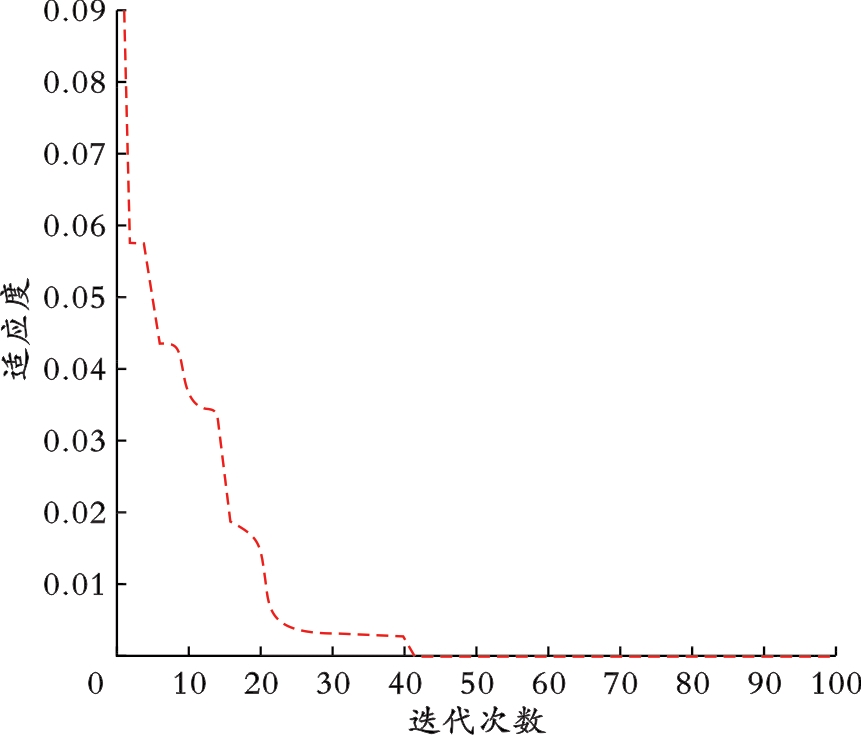
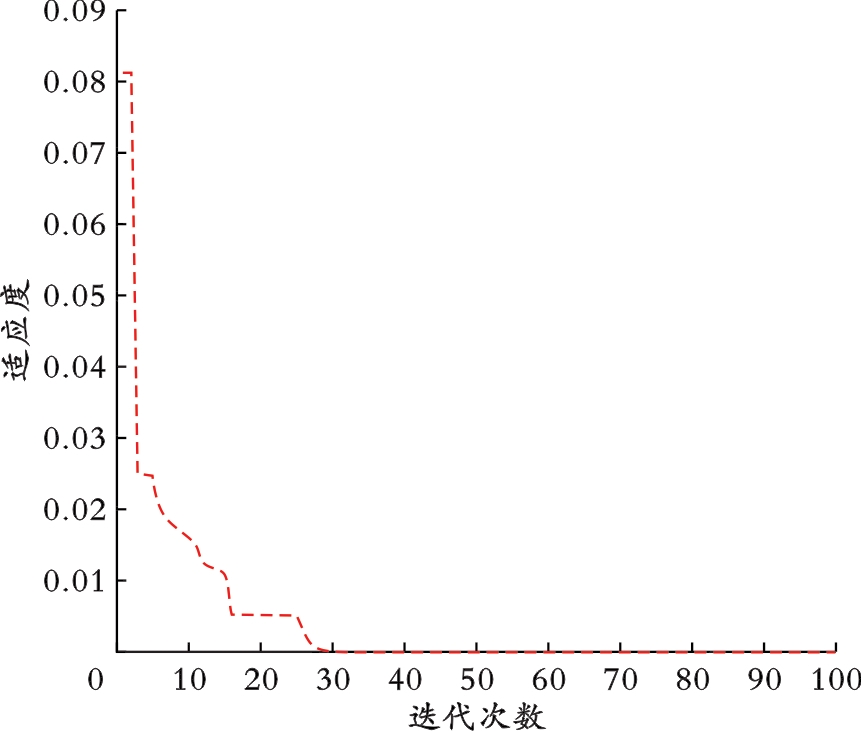
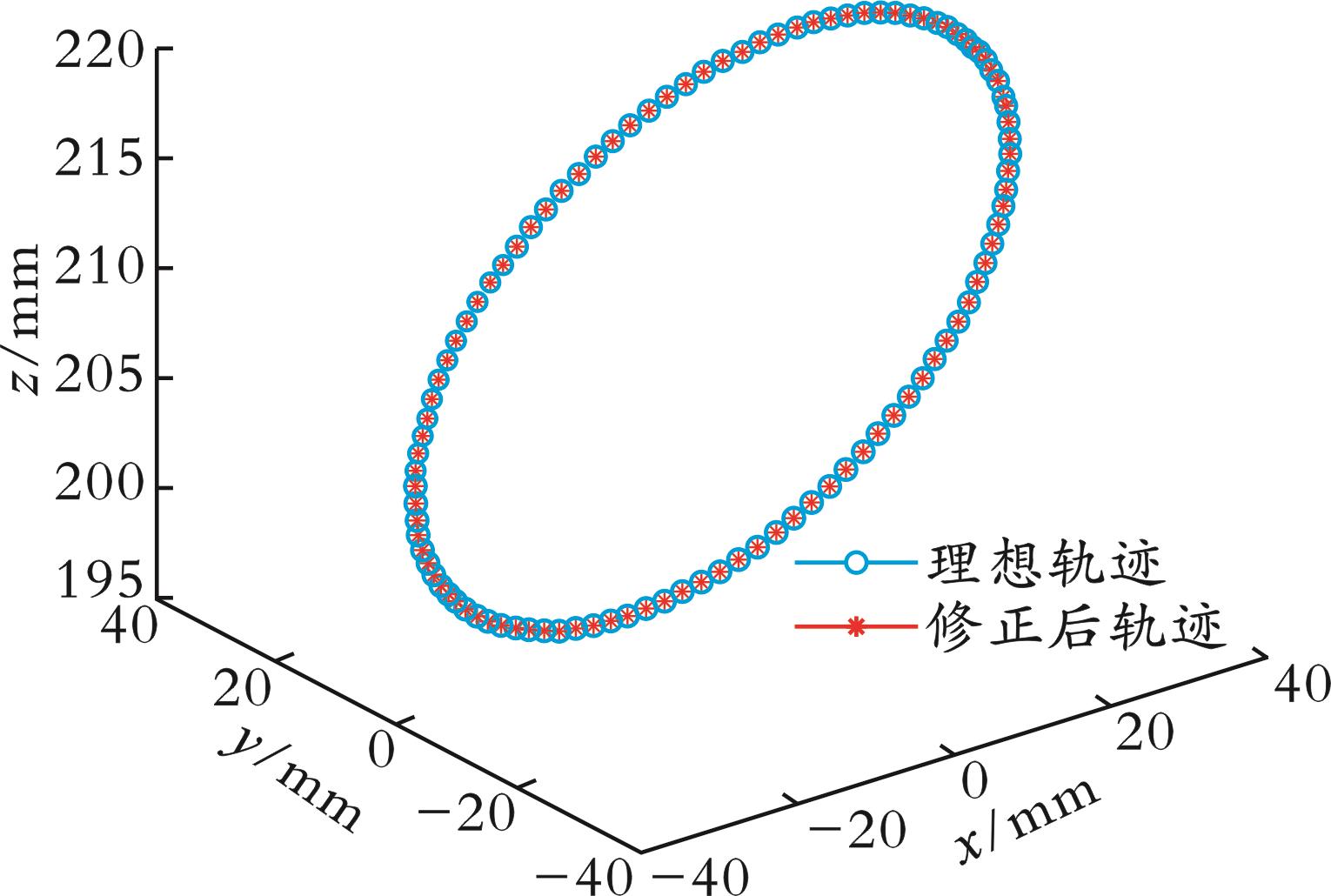
以6?PTRT并联机器人为研究对象,建立其位姿误差模型,利用单支链闭环矢量法,依据输入输出关系,建立误差方程。依据6?PTRT并联机器人的位姿误差模型,将机构误差转化为驱动杆误差,利用MATLAB软件分析各个驱动杆杆长误差参数对其输出位姿误差的影响;建立并联机器人位姿误差修正的目标函数,利用基于带收缩因子的自适应权重粒子群算法寻优各个驱动杆误差参数,修正末端位姿、提高运动学精度,为6?PTRT并联机器人动力学、位姿标定以及轨迹规划和控制等问题提供理论依据。
中图分类号:
张树梅, 高兴军, 邓子龙, 王月. 基于粒子优化算法的并联机器人误差建模分析[J]. 辽宁石油化工大学学报, 2021, 41(5): 79-84.
Shumei Zhang, Xingjun Gao, Zilong Deng, Yue Wang. Error Modeling and Analysis of Parallel Robot Based on Particle Optimization Algorithm[J]. Journal of Liaoning Petrochemical University, 2021, 41(5): 79-84.
网站版权 © 2024《辽宁石油化工大学学报》编辑部
地址:辽宁省抚顺市望花区丹东路西段1号 电话:024-56865105 E-mail:lnxuebao@126.com 邮编:113001
本系统由北京玛格泰克科技发展有限公司设计开发