辽宁石油化工大学学报 ›› 2023, Vol. 43 ›› Issue (5): 68-74.DOI: 10.12422/j.issn.1672-6952.2023.05.011
Lei GAO( ), Dexia CHI(), Runfu SUN, Xuerui PAN
), Dexia CHI(), Runfu SUN, Xuerui PAN
摘要:
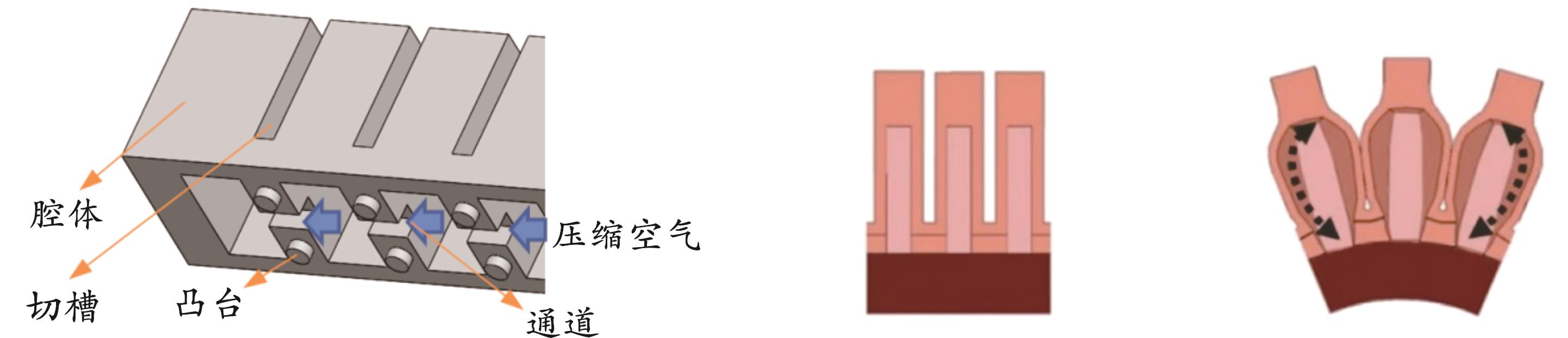
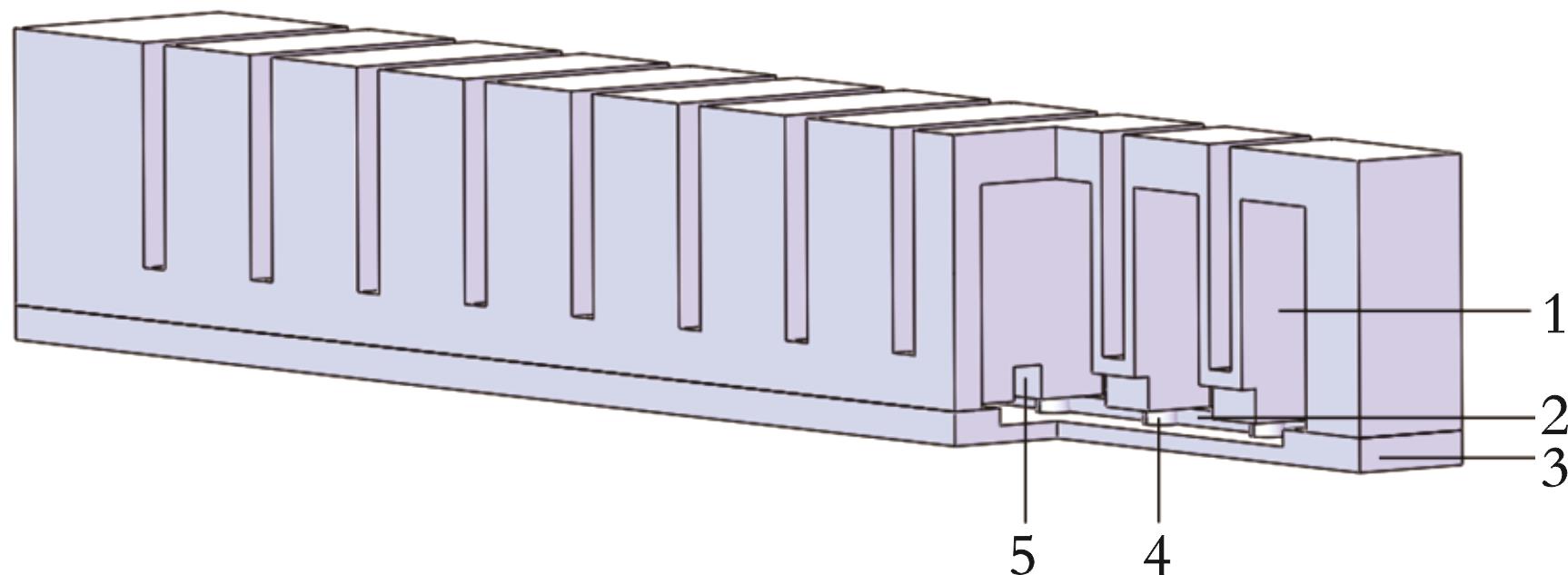
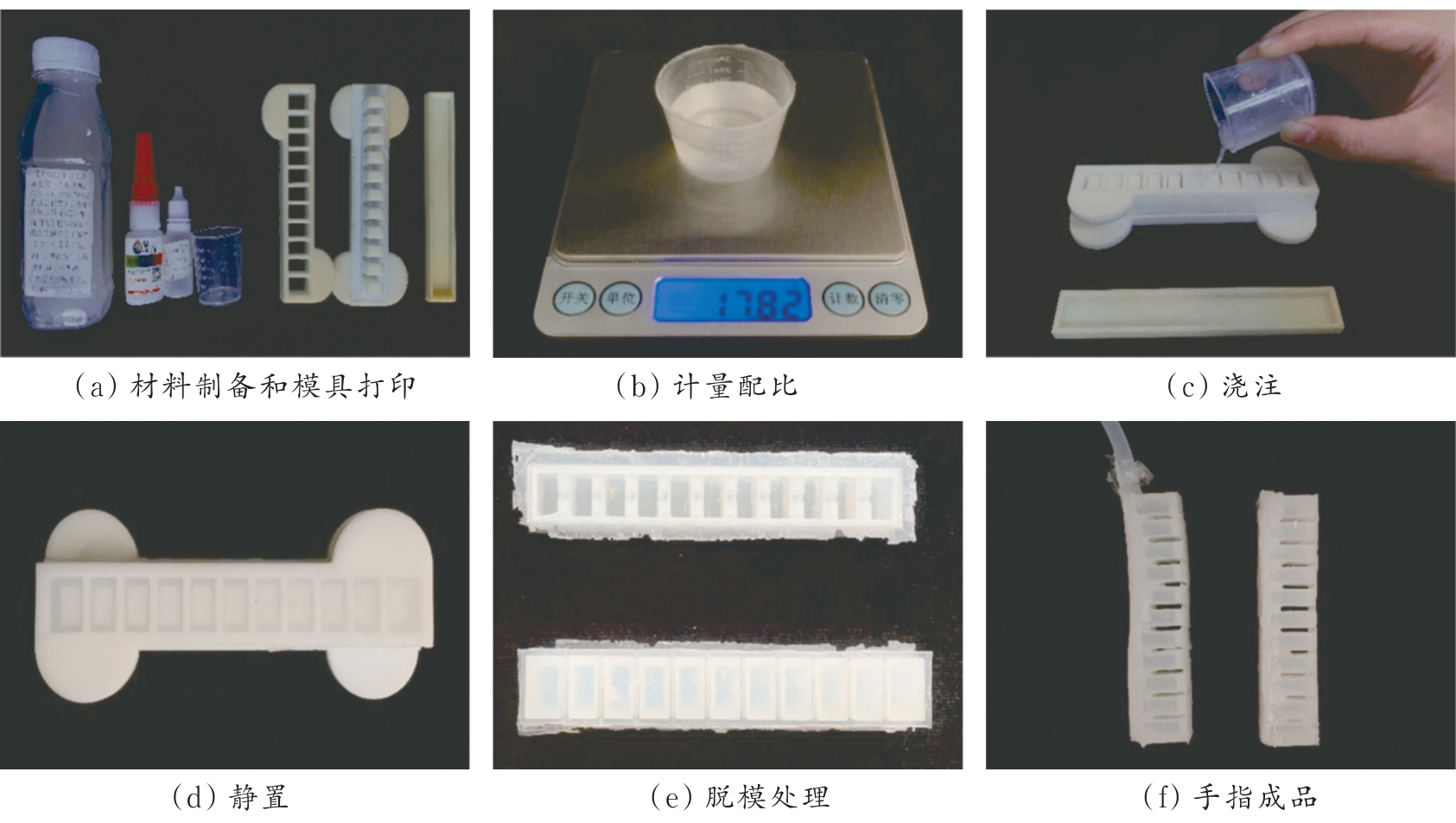
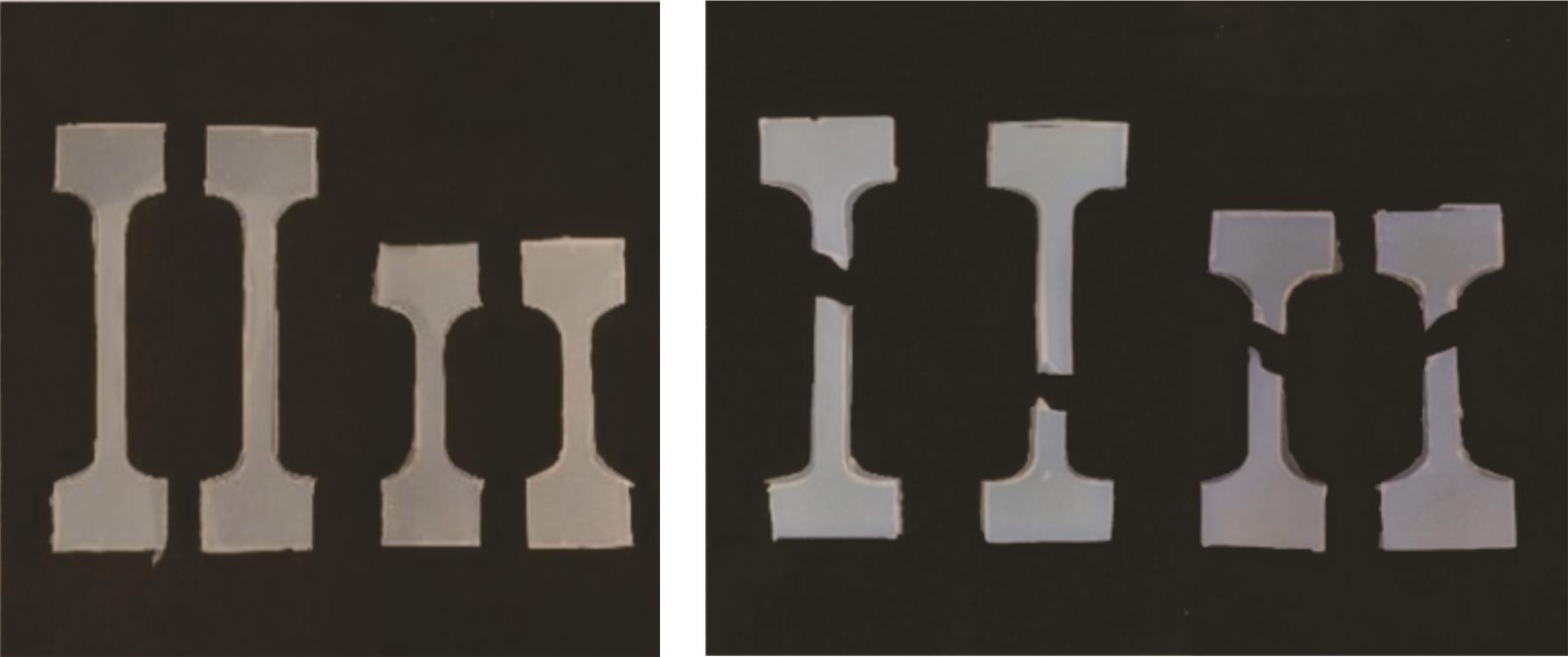
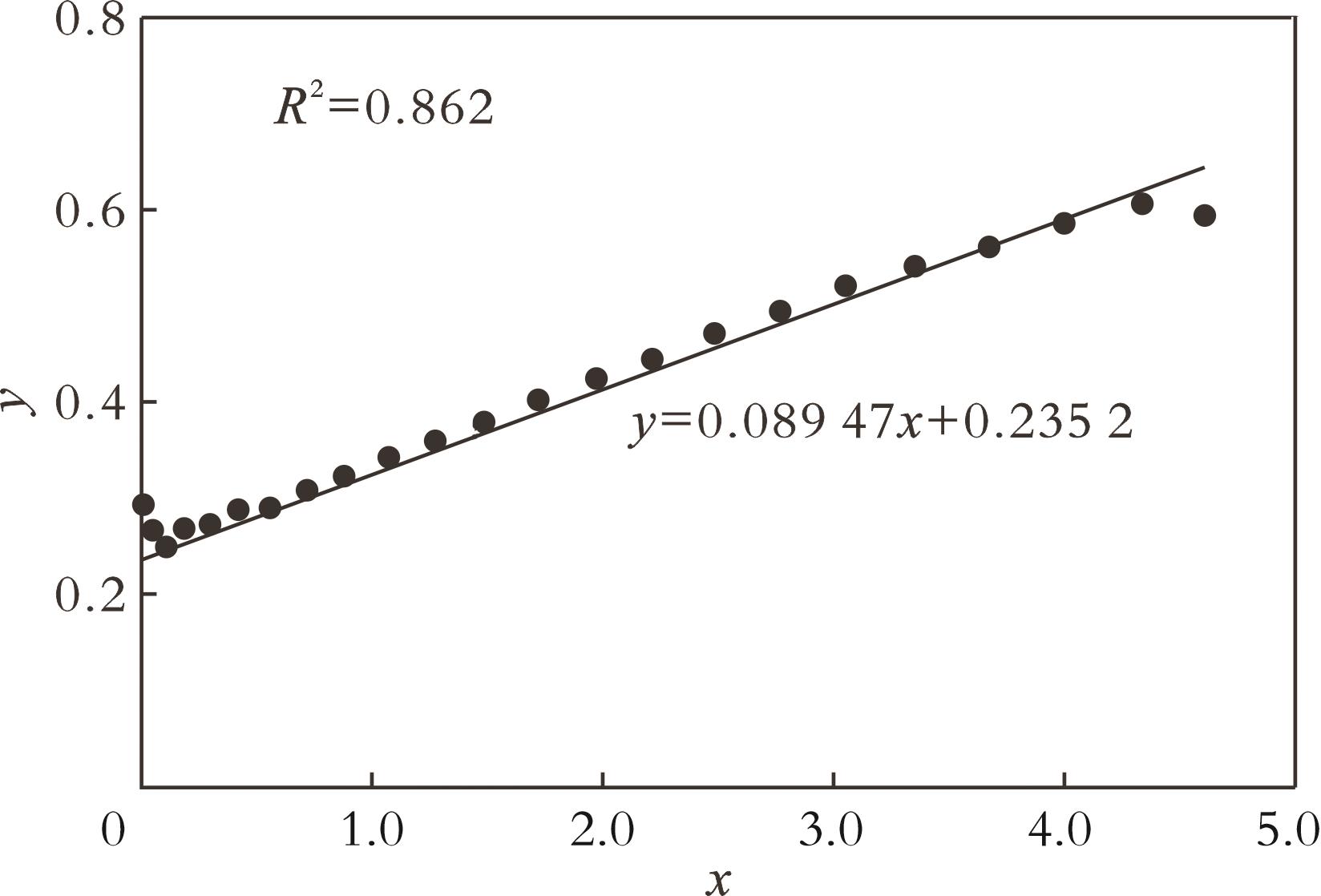
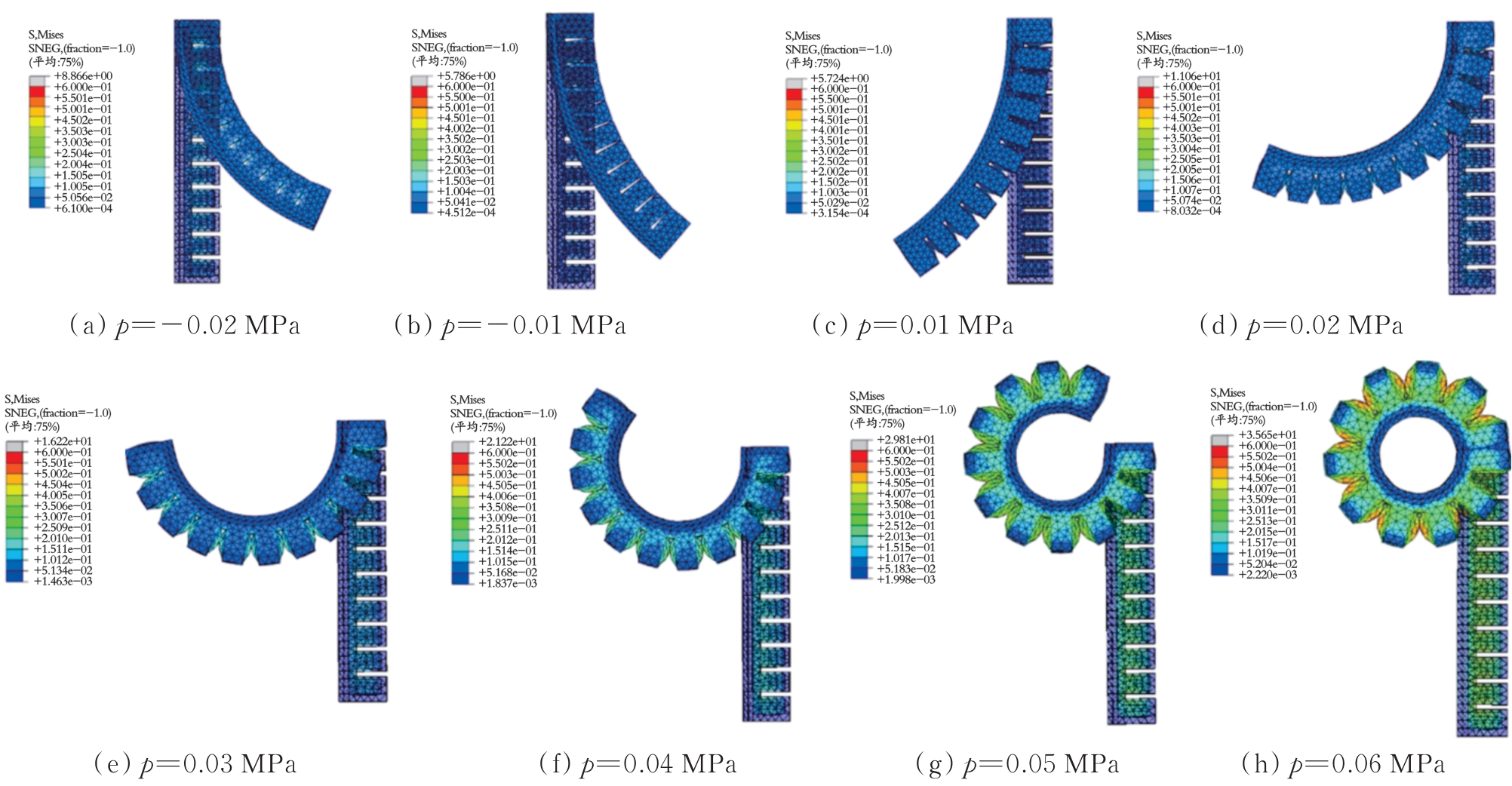
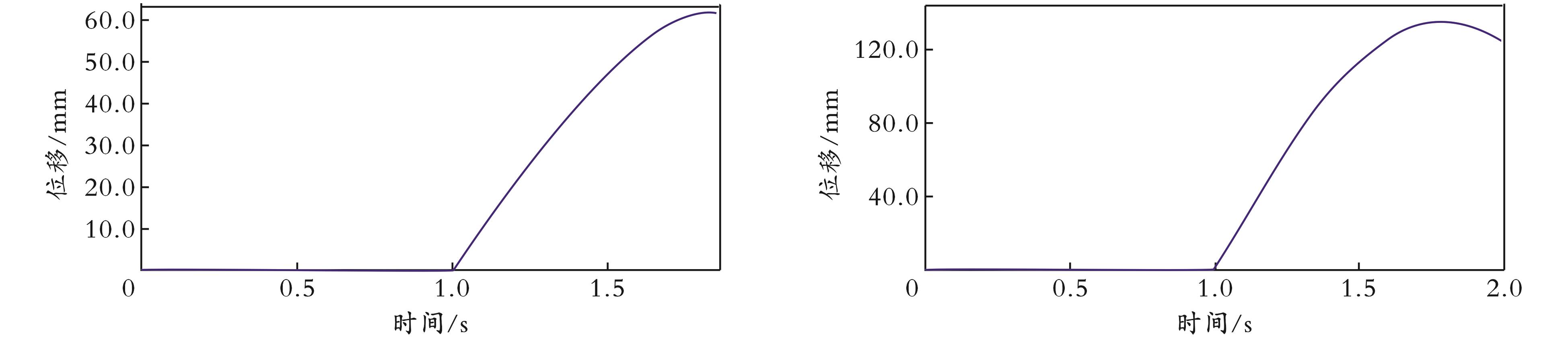
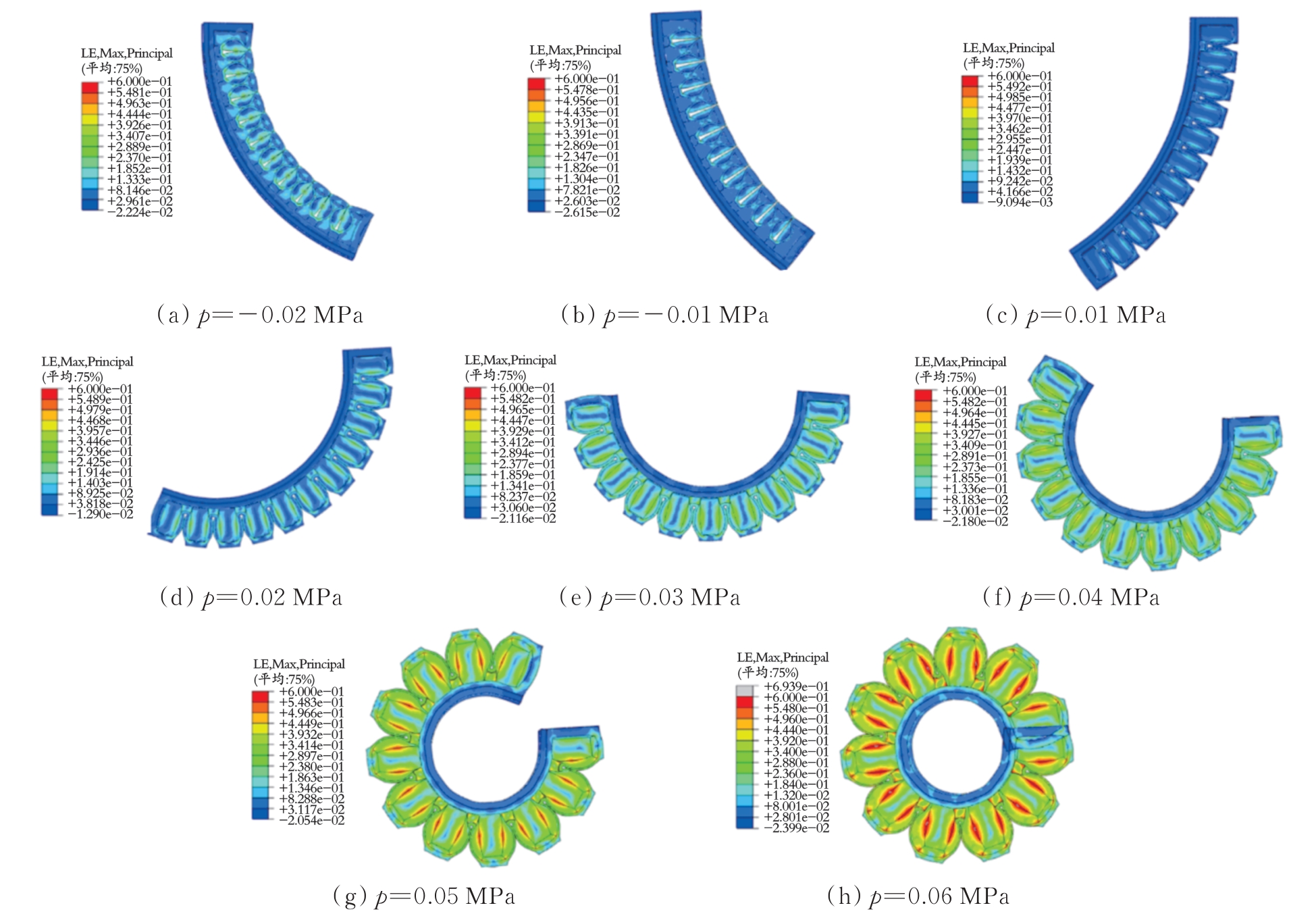
设计一种柔性机械手指,通过3D打印机打印了柔性机械手指模具,并以硅胶为原料制备了柔性机械手指;通过拉伸试验得到了硅胶材料的应变能密度函数的模型参数C10和C20,并用Solidworks软件建立柔性机械手指三维模型,用ABAQUS软件分析了该柔性机械手指在压力为-0.02~0.05 MPa时的应力与应变。结果表明,当压力为-0.02 MPa时,最大应力与最大应变分别为-8.866 MPa和-0.564;当压力为0.05 MPa时,最大应力与最大应变分别为2.981 MPa和0.711。建立柔性机械手指试验装置,获取了柔性机械手指在不同压力下的弯曲变形情况和手指末端的位移。结果表明,其横向最大位移为7.60 mm。
中图分类号:
高磊, 迟德霞, 孙润富, 潘学睿. 多腔体柔性机械手指设计与弯曲变形研究[J]. 辽宁石油化工大学学报, 2023, 43(5): 68-74.
Lei GAO, Dexia CHI, Runfu SUN, Xuerui PAN. Multi⁃Cavity Flexible Mechanical Finger Design and Bending Deformation Study[J]. Journal of Liaoning Petrochemical University, 2023, 43(5): 68-74.
网站版权 © 2021《辽宁石油化工大学学报》编辑部

本系统由北京玛格泰克科技发展有限公司设计开发